
Chen Yu
Research Scientist @ London
I obtained my doctoral degree at the National University of Singapore (NUS) under the guidance
of Prof. Gim Hee
Lee,
supported by a Google PhD
Fellowship.
My academic journey began with an M.S. in Computer Science at Peking University, working with Prof. Yisong
Chen and
Prof.
Shuhan Shen, and a B.E. in Software Engineering from Beihang University.
I claim that I won't be serving as a reviewer for NeurIPS or submitting papers to it due to its ridiculous
sanctions for Chinese affiliations!
Latest News
Feb 2026
Paper on Scaling up 3D data for foundation model
training accepted at CVPR 2026!
Sep 2025
Successfully defended my PhD thesis! 🎉
Sep 2025
Paper on 3D geometric foundation models for Gaussian
Splatting accepted at NeurIPS 2025!
Jan 2025
Received the Research
Achievement Award at SoC | NUS!
Sep 2024
Received the Chinese Government Award for Outstanding
Self-Financed Students Abroad! 🎉
Sep 2024
Paper on distributed large-scale 3D Gaussian
Splatting accepted at NeurIPS 2024!
May 2024
Invited talk at 3D CVer
on distributed 3D Gaussian Splatting!
Feb 2024
Paper on anti-aliasing 3D Gaussian Splatting accepted
at CVPR 2024!
Jan 2024
Awarded the Dean's Graduate Research
Achievement Award at NUS! 🎉
Nov 2023
Awarded the Google PhD
Fellowship 2023 in Machine Perception! 🎉
Aug 2023
Received the Research Achievement Award at SoC | NUS! 🎉
Jul 2023
Paper on registering neural radiance fields accepted
at ICCV 2023!
Jan 2023
Paper on neural radiance fields accepted at CVPR 2023!
Jan 2023
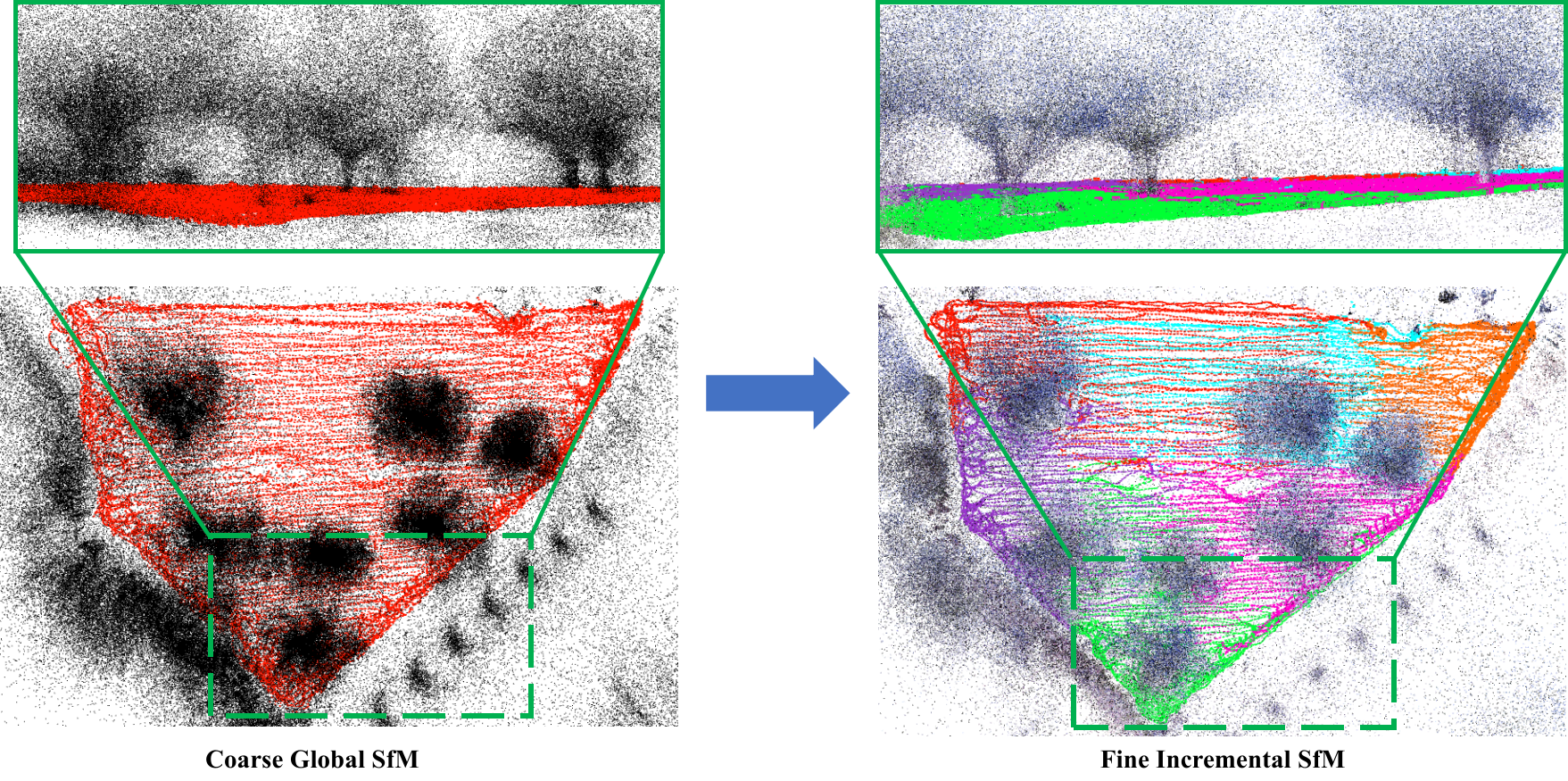
Paper on large scale Structure-from-Motion accepted
at ICRA 2023!
Jan 2022
Joined the CVRP lab at NUS as a PhD student!
May 2021
Paper on rotation averaging accepted at CVPR 2021!
July 2020
Paper on large-scale SfM accepted at Pattern Recognition 2020!
Publications
Hover or tap the lightbulb beside author names to see the main idea
10 publications



Swipe or use arrows to scroll through publications
Awards & Honors
Jan 2025
Research
Achievement Award, SoC, NUS
Sep 2024
Chinese Government Award for Outstanding Self-Financed Students Abroad
Jan 2024
Dean's Graduate Research Achievement Award, SoC, NUS
Nov 2023
Google PhD
Fellowship 2023
Aug 2023
Research Achievement Award, SoC, NUS
Aug 2021
Rising Star in the Quarter, Segway Robotics
Nov 2019
2nd Place in 3D Reconstruction Track, China VR Innovation Challenge
Apr 2018
2nd Place in 3v3 Basketball, Peking University
Mar 2014
Top Ten Broadcasting Hosts, BUAA
Nov 2013
Champion in Speech Contest, School of Software, BUAA
Experience

SLAM Algorithm Engineer
Visual-Inertial-Odometry SLAM, Marker SLAM, Outdoor Multi-sensor Fusion
SfM
Algorithm Intern
Visual-Inertial SLAM, Self-Calibration on scooters (with Jianming Li)

Research Intern
High-Definition mapping, Rotation Averaging (with Dr. Ji Zhao)

Algorithm Intern
Real-time 3D reconstruction, texture mapping